
RMD, enfin ! Jeudi 23 mars 2023, l’ENSEIRB MATMECA à...
Suite



Ouverture des inscriptions aux concours
Inscrivez vous rapidement aux évènements
Suite
Challenges robotiques C4
Des challenges robotiques collèges / lycées ont eu lieux cette...
Suite
Lumière sur Bazas
Le collège de Bazas a remporté une double victoire à...
Suite
RoboCup Open Académique 2022
Jeudi 14 avril 2022 a eu lieu les sélections académiques...
Suite
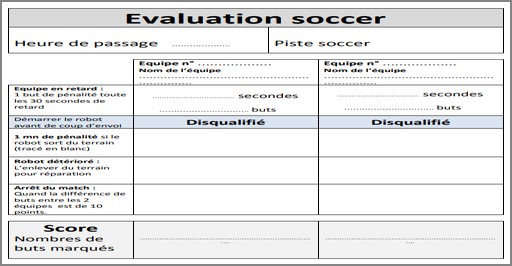
Remise des kits
Un kit Yes We Play Soccer vient d'être distribué.
Suite
Prêt de matériel avec Aquitaine Robotics
Pratiques autour de la robotique dans l'industrie et celle enseignée...
Suite
Journée de présentation de la Junior SSL
Précédent Suivant Vendredi 15 octobre 2021, des professeurs de collèges...
Suite
Remise de récompenses au collège Jean Moulin de Marmande
Anissa, Lila, Mathis et Luc collège Jean Moulin de Marmande,...
Suite
Remise de récompenses au lycée de la Mer de Gujan-Mestras
Les élèves du lycée de la Mer de Gujan-Mestras, encadrés...
Suite
Remise de récompenses au collège Anatole France de Cadillac
Les élèves du collège Anatole France de Cadillac, encadrés par...
Suite
Nouvelle date pour la RoboCupJunior Open Académique 2022
La RoboCupJunior Open Académique dans le cadre du Robot Makers’...
Suite
Remise de diplômes, équipe Rescue Line RoboCupJunior du Collège Bourran
Pour leur participation à la RoboCupJunior Open Académique dans la...
Suite
Remise de diplômes, équipe On Stage RoboCupJunior du Collège Bourran
Pour leur participation à la RoboCupJunior Open Académique dans la...
Suite
L’équipe Discovery des Tucss de Brive reçoit ses cadeaux
Les jeunes de l’équipe « Tucss » de Brive ont reçu leurs...
Suite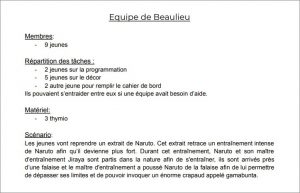
RCJ OA – On Stage – Mikado – Centre d’animation de Beaulieu – Poitiers
L’équipe « Mikado » du Centre d’animation de Beaulieu de Poitiers a...
Suite
RCJ OA – On Stage – Bouge tes jeunes Châlus – Ligue 87 – Limoges
L’équipe « Bouge tes jeunes Chalus » de la Ligue de l’enseignement...
Suite
RCJ OA – Discovery – Académie Younus – Artigues-près-Bordeaux
L’équipe « Académie Younus » de la Ligue de l’enseignement de Artigues-près-Bordeaux...
Suite
Des cadeaux pour les participants à la RoboCupJunior Open Académique
Afin de remercier le travail des équipes participantes à la...
Suite
RCJ OA – On Stage – Un rover pour Mars – Collège Alfred Mauguin – Gradignan
2 équipes d’élèves du collège Alfred Mauguin de Gradignan ont...
Suite
RCJ OA – Maze – VicTeam – Lycée Gustave Eiffel Bordeaux
Les élèves du Lycée Gustave Eiffel de Bordeaux ont participé...
Suite
RCJ OA – Maze – Magendie 2 – Lycée François Magendie Bordeaux
Les élèves du Lycée François Magendie de Bordeaux ont participé...
Suite
RCJ OA – Maze – Magendie 1 – Lycée François Magendie Bordeaux
Les élèves du Lycée François Magendie de Bordeaux ont participé...
Suite
RCJ OA – Rescue Line – Defdaguin(y) – Lycée Fernand Daguin Mérignac
Les élèves du Lycée Fernand Daguin de Mérignac ont participé...
Suite
RCJ OA – Rescue Line – Defdaguin(x) – Lycée Fernand Daguin Mérignac
Les élèves du Lycée Fernand Daguin de Mérignac ont participé...
Suite
RCJ OA – Rescue Line Entry – MRavel Donibane – Collège Maurice Ravel Saint Jean de Luz
Les élèves du Collège Maurice Ravel de Saint-Jean-de-Luz ont participé...
Suite
RCJ OA – On Stage – MaryTeam – EleKtrons Libres – Pau
L’équipe « MaryTeam » des EleKtrons Libres de Pau a participé cette...
Suite
RCJ OA – Maze – AMazeHeal II – EleKtrons Libres – Pau
L’équipe « AMazeHeal II » des EleKtrons Libres de Pau a participé...
Suite
RCJ OA – Soccer balle passive – Claveille – Lycée Claveille Périgueux
Les élèves du Lycée Claveille de Périgueux ont participé cette...
Suite
RCJ OA – Discovery – Tucss – Brive
L’équipe « Tucss » de Brive a participé cette année à la...
Suite
RCJ OA – On Stage – Espac’Ados 2 – Poitiers
L’équipe « Espac’Ados 2 » de Poitiers a participé cette année à...
Suite
RCJ OA – On Stage – Espac’Ados 1 – Poitiers
L’équipe « Espac’Ado 1 » de Poitiers a participé cette année à...
Suite
RCJ OA – On Stage – Ligue E. 17-2 – Ligue de l’enseignement La Rochelle
L’équipe « Ligue E. 17-1 » de la Ligue de l’enseignement de...
Suite
RCJ OA – On Stage – Ligue E. 17-1 – Ligue de l’enseignement La Rochelle
L’équipe « Ligue E. 17-1 » de la Ligue de l’enseignement de...
Suite
RCJ OA – On Stage – Les promeneurs du net – Ligue de l’enseignement Landes
2 jeunes, l’équipe « Les promeneurs du net » de la Ligue...
Suite
RCJ OA – Rescue Line – Wall-E 2.0 – Lycée Fernand Daguin – Mérignac
4 élèves du lycée Fernand Daguin de Mérignac ont participés...
Suite
RCJ OA – Rescue Line – Space Girls – Lycée de la Mer – Gujan-Mestras
4 élèves du lycée de la Mer à Gujan-Mestras ont...
Suite
RCJ OA – Rescue Line – Sovekipeu 2 – Collège Jean Moulin – Marmande
Les élèves du collège Jean Moulin de Marmande ont participé...
Suite
RCJ OA – Rescue Line – Schoolbots 3 – Collège des Trois Vallées – Vergt
4 élèves du collège des Trois Vallées de Vergt ont...
Suite
RCJ OA – Rescue Line – Team Lovelace – Lycée Fernand Daguin – Mérignac
5 élèves du lycée Fernand Daguin de Mérignac ont participé...
Suite